
光は空間を直進する。壁に衝突すればそこで進路を絶たれる。この単純な物理法則は、人類が有史以来受け入れてきた絶対的な視覚の制約である。壁の向こう側を見る。あるいは、角を曲がった先の暗がりを直接覗き込まずに把握する。人間の網膜の限界を超えるこの行いは、長きにわたり神話やSFの専売特許であった。
だが、光は完全には消滅しない。壁に当たった光の一部は角の奥へと散り、隠れた物体にぶつかり、再び壁を跳ね返って観測者の元へとかすかな痕跡を残して戻ってくる。この極めて微弱な「光のこだま」を精緻に捉え、計算によって死角にある世界を逆算して描き出せるのではないか。これが、近年急速に発展してきた非視線(NLOS:Non-Line-Of-Sight)イメージングと呼ばれる領域の根源的な問いである。
これまで、この壮大な問いに対する科学の回答は、冷酷なまでに特権的なものであった。巨大で高価なレーザーと暗室環境に縛られ、現実世界への応用は絶望視されてきた。しかし今、我々のポケットに収まる100ドル未満のスマートフォン搭載LiDARが、その分厚い壁を突破しようとしている。
マサチューセッツ工科大学(MIT)メディアラボのSiddharth Somasundaram氏率いる研究チームは、ハードウェアの力技に頼るのではなく、アルゴリズムの冴えで正面から突破口を開いた。彼らが科学誌『Nature』に発表した「Motion-Induced Aperture Sampling(MAS:運動誘起開口サンプリング)」という新しい計算モデルは、欠損だらけの光の破片を時間と空間の軸で縫い合わせる。数千万の実験機材を100ドルのチップへと置き換え、非視線イメージングの民主化を成し遂げたこの画期的なブレイクスルーを見ていこう。
01.絶対的な物理の壁と、高額な代償を伴う従来技術の限界1.1光の減衰と「ピコ秒」の戦い1.2眼球への危険性と「実験室の特権」02.ポケットの中のパラダイムシフト。スマートフォンのLiDARが秘める力2.1SPADセンサーの進化と量産効果によるハードウェアの民主化2.2街角のノイズと市販センサーのジレンマ03.欠落した光を時間で繋ぐ。MASモデルが描く軌跡3.1パラパラ漫画の補間と「Motion-Induced Aperture Sampling」3.2時間と空間を縫い合わせる光円錐変換04.確率の網で影を捕らえる。パーティクルフィルタリングによる逆算の妙4.11秒間に30回の「見えない逃亡者」探索05.影が教える自己の座標。3つの実証実験が示す社会実装の青写真5.1形状復元、多重追跡、そして「自己位置推定」への飛躍06.プラグアンドプレイが切り拓く未来と、残された未解明の問い6.1拡散反射の壁とアルゴリズムの進化6.2透視技術がもたらすプライバシーの波紋と倫理的課題絶対的な物理の壁と、高額な代償を伴う従来技術の限界
光の減衰と「ピコ秒」の戦い
光の速度は秒速約30万キロメートルに達する。NLOSイメージングにおいて、光はLiDARから壁へ、壁から隠れた物体へ、物体から壁へ、そして再びLiDARのセンサーへと、最低3回の反射(マルチバウンス)を繰り返す。反射のたびに光のエネルギーは四方八方に散らばり、劇的に減衰していく。最終的にセンサーに到達する光子は、照射時の数百万分の一以下という絶望的な少なさである。
この微細な光の破片から隠れた物体の位置と形状を逆算するには、光が往復する時間をピコ秒(1兆分の1秒)単位で正確に計測しなければならない。少しの測定誤差が、空間におけるセンチメートル単位のズレを生むからだ。従来、この精度を叩き出すためには、50万ドルから100万ドル規模に達する巨大で高出力な超短パルスレーザーと、外乱光を極限まで排除した厳密な暗室環境が不可欠であった。
眼球への危険性と「実験室の特権」
さらに厄介なのが安全性の問題である。微弱な戻り光を増幅させる手っ取り早い物理的手段は、単純にレーザーの出力を上げることである。しかし、自動運転車が走る市街地や人間が生活する室内でそのような高出力レーザーを放てば、行き交う人々の眼球に不可逆的な損傷を与えかねない。
そのため、安全基準(アイセーフティ)の枠外にある高出力レーザーの使用は、厳格に管理された実験室内に限定されてきた。NLOSイメージングは、理論の美しさやポテンシャルとは裏腹に、社会実装からは程遠い箱入り娘のような状態に留まっていた。
ポケットの中のパラダイムシフト。スマートフォンのLiDARが秘める力
SPADセンサーの進化と量産効果によるハードウェアの民主化
風向きを変えたのは、自動運転やAR(拡張現実)分野における巨大テクノロジー企業の激しい技術開発競争である。AppleがiPhone 12 Pro以降の機種にLiDARスキャナを標準搭載して以来、空間の奥行きを測る技術は急速にコモディティ化し、世界の半導体サプライチェーンは激変した。
中でも、単一の光子(フォトン)さえ検知できる超高感度な「SPAD(単一光子アバランシェダイオード)」センサーは、微細化と量産化の恩恵を極限まで受けた。かつては特殊な用途にしか使われなかったこの高精度な光学センサーが、今や数十ドルで取引される汎用部品となっている。
街角のノイズと市販センサーのジレンマ
ハードウェアが安価になったとはいえ、NLOS特有の難題が消え去ったわけではない。市販のLiDARはバッテリー駆動の制約と、前述のアイセーフティ基準を満たすため、レーザー出力は実験室の機材に比べて極端に低く設定されている。空間分解能も約100ピクセル程度と粗く、発射されるレーザーパルス幅も広い。
さらに、現実の生活空間では対象物もカメラも絶えず動き回る。微弱な「こだま」は、手ブレやモーションブラー(被写体ブレ)の海に容易に飲み込まれてしまう。市販デバイスを用いた透視技術の実現は、欠損だらけの不完全なパズルのピースを、吹き荒れる嵐の中で組み立てるような徒労に思われていた。
欠落した光を時間で繋ぐ。MASモデルが描く軌跡
パラパラ漫画の補間と「Motion-Induced Aperture Sampling」
この絶望的なノイズの海から真実を引き上げたのは、Somasundaramらのチームが構築したアルゴリズムである。彼らは、一度のレーザー照射(単一フレーム)で完璧な像を得ようとする従来のアプローチを完全に放棄した。
その代わり、現代のスマートフォンカメラが暗所で行う「バースト撮影(連続撮影によるノイズ低減)」や、人工衛星が自身の軌道移動を利用して巨大アンテナと同等の解像度を得る「合成開口レーダー(SAR)」の概念を導入した。一瞬の切り取りでは何も見えなくとも、連続するフレームを束ねていくことで真実の姿を復元できるという仮説に基づく。これを数学的に結実させたのが、「Motion-Induced Aperture Sampling(MAS:運動誘起開口サンプリング)」モデルである。
時間と空間を縫い合わせる光円錐変換
MASモデルの核心は、「物体の不変の形状(時空間インパルス応答)」「物体の並進運動」「カメラ自身の移動」という、互いに絡み合う3つの物理的効果を、単一の畳み込み方程式へとエレガントに統合した点にある。ここでは「光円錐変換(Light-Cone Transform)」と呼ばれる数学的手法が用いられ、光の飛行時間(時間軸)と対象物の奥行き(空間軸)を同一の土俵で扱うことに成功した。
例えるなら、1枚ごとに虫食いだらけで何が描かれているか全く分からないパラパラ漫画であっても、対象物とカメラが少しずつ視点を変えながらページをめくり続けることで、人間の脳はその虫食いの隙間を補間し、ひとつの動く形を見出す。MASモデルが行っているのは、まさにこの時間と空間を通じた高度な補間計算のデジタル空間での実行である。
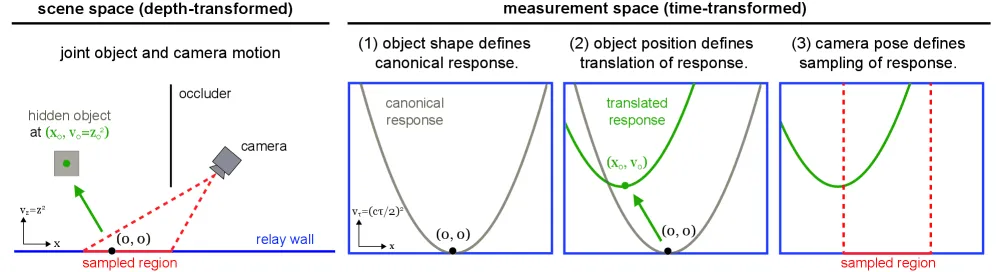 研究チームが提唱した「Motion-Induced Aperture Sampling(MAS)」モデルの概念図。物体の固有の形状が作り出す基準パターンに対し、物体の移動による空間的なズレ、そしてカメラの移動による測定範囲のサンプリングという3つの異なる効果を単一の数学的枠組みに統合している。(Credit: Siddharth Somasundaram, Aaron Young, Akshat Dave, Adithya Pediredla, Ramesh Raskar, Nature (2026). DOI: 10.1038/s41586-026-10502-x)
研究チームが提唱した「Motion-Induced Aperture Sampling(MAS)」モデルの概念図。物体の固有の形状が作り出す基準パターンに対し、物体の移動による空間的なズレ、そしてカメラの移動による測定範囲のサンプリングという3つの異なる効果を単一の数学的枠組みに統合している。(Credit: Siddharth Somasundaram, Aaron Young, Akshat Dave, Adithya Pediredla, Ramesh Raskar, Nature (2026). DOI: 10.1038/s41586-026-10502-x)
確率の網で影を捕らえる。パーティクルフィルタリングによる逆算の妙
1秒間に30回の「見えない逃亡者」探索
MASモデルによって光の情報を整理できたとしても、ノイズまみれの粗いデータから「現在、物体がどこにあるのか」をリアルタイムで特定する作業は、極めて計算負荷の高い非線形逆問題となる。スマートフォンクラスの限られた演算処理能力でこれを解き明かすため、チームは「パーティクルフィルタリング」という確率論的な推論手法を採用した。
このプロセスは、見えない逃亡者を追う無数の探偵の探索劇に似ている。システムはまず、1,000個の「粒子(パーティクル)」と呼ばれる仮想の予測モデルを3次元空間にばらまく。それぞれの粒子は「物体は前の時刻から計算して、今はこの位置に移動したはずだ」という独自の仮説を抱えている。
次に、実際のLiDARセンサーから届いた極めて不完全な最新の計測データと、各粒子の仮説に基づく予測データを照らし合わせる。現実の計測データと辻褄が合う予測を立てた粒子には高いスコアが与えられ、見当違いの予測を立てた粒子には低いスコアが下される。続く再サンプリングのステップで、低スコアの粒子は容赦なく淘汰され、高スコアの粒子が増殖して次の時間の予測へと引き継がれる。
これを1秒間に30回(30Hz)という猛烈な速度で繰り返すことで、最初はやみくもに散らばっていた粒子群は、次第に見えない物体の真の位置を包み込むような確率の雲(分布)へと収束していく。計算機にかかる負荷を劇的に抑えつつ、ノイズによる情報の欠損を確率論でしなやかに吸収するこの手法により、市販デバイスでのリアルタイム駆動が実現したのである。
影が教える自己の座標。3つの実証実験が示す社会実装の青写真
形状復元、多重追跡、そして「自己位置推定」への飛躍
この独自のアルゴリズムアーキテクチャを基盤として、研究チームは100ドル未満の市販センサー(ST VL53L8CX SPAD等)を用い、従来の常識を覆す3つの驚異的なアプリケーションを実証した。
第一に、隠れた静止物体の3D形状の再構築である。スマートフォンを手持ちで動かし、仮想の鏡となる壁面上のスキャン領域を広げることで、隠れたマネキンや切り抜き文字の形を鮮明に捉えることに成功した。
第二に、単一および複数物体のリアルタイム3Dトラッキングである。事前の形状データに基づく制約を活用することで、壁の奥で動く物体の軌跡を平均誤差4.7cmという精度で追跡した。さらに実験では、2つの独立して動く手を同時に追従させることにも成功しており、ARデバイスにおいてユーザーの手が視界から外れた際の位置推定などへの応用が期待される。
第三の成果は、最も直感に反する「カメラの自己位置推定(Localization)」である。通常、ドローンやロボットが自身の位置を把握する技術(SLAMなど)は、視界内の風景の特徴点に依存している。そのため、無地の白い壁のような特徴のない空間では容易に迷子になってしまう。しかし本システムは、壁の向こう側に隠れている静止物体を「目に見えないランドマーク」として利用し、自分自身の軌跡を高精度に逆算してみせた。
従来のシステムと今回の画期的な成果の違いは、以下の表に明確に表れている。
プラグアンドプレイが切り拓く未来と、残された未解明の問い
拡散反射の壁とアルゴリズムの進化
特権的な研究室の奥深くに鎮座していた透視の技術を、我々が日常的に持ち歩くポケットの中のデバイスの領域へと移行させたこと。ソースコードが一般に公開され、誰もが安価な部品で非視線イメージングの実験を行える環境が整ったこと。この技術の民主化は、ロボット工学や空間コンピューティングの景色を一変させる起爆剤となる。
交差点の死角に潜む歩行者を事前に察知する自動運転車、散らかった室内を死角ゼロで滑らかに移動する自律型ロボット、あるいは災害時に瓦礫の奥を可視化するレスキュードローン。これまで高コストゆえに見送られてきた構想が、一気に現実味を帯びてくる。
だが、この技術にはまだ乗り越えるべき空白地帯(Research Gaps)が残されている。現在の実験の多くは、微弱な信号を補強するために、光を光源の方向に強く反射する素材(レトロリフレクター)を装着した物体に依存している部分がある。一般的な衣服などの拡散反射面でも機能することは証明されたが、信号の大幅な減衰は避けられず、複雑な環境光下での安定性には課題が残る。また、対象物の形状が事前に把握できず、かつ歩行者のように時々刻々と変形するシナリオに対するロバスト性の確保は、次なる研究の主戦場となる。
透視技術がもたらすプライバシーの波紋と倫理的課題
技術が社会に解き放たれるとき、そこには必ず新たな摩擦が生じる。スマートフォンで角の向こう側の人物の動きを追跡できる世界は、利便性と引き換えに深刻なプライバシーの懸念を呼び起こす。「見えないはずの空間」が誰かの手元で密かに可視化されるという事実は、現代のデジタル社会における新たな火種となり得る。社会実装に向けては、機械学習によるアルゴリズムの高度化やLiDARハードウェアの進化と並行して、悪用を防ぐ法整備や倫理面でのガードレール構築が急務となる。
光が直進するという物理法則を人為的にねじ曲げることはできない。だが、砕け散った光のこだまに耳を澄ませ、計算の力で編み直すことは可能である。100ドルのLiDARセンサーが切り拓いた見えない世界の輪郭は、まだ粗く不完全かもしれない。それでもその曖昧なシルエットは、人類の視覚空間がデジタル技術によって拡張される、新たな時代の幕開けを紛れもなく告げている。